
释放双眼,带上耳机,听听看~!
这个教程示范怎么读取ADXL3xx系列的模拟加速计设备(如ADXL320, ADXL321, ADXL322, ADXL330),并且通过IDE串口监视器或者其他应用传达加速度到个人电脑里。
目录
简介
- 这个教程示范怎么读取ADXL3xx系列的模拟加速计设备(如ADXL320, ADXL321, ADXL322, ADXL330),并且通过IDE串口监视器或者其他应用传达加速度到个人电脑里。
- 这个教程是用Sparkfun的开源板。adafruit加速计开源板同样可以工作,尽管需要不同的连线。
- ADXL3xx的输出(加速计的每个轴)是作为模拟电压输出,范围在0到5V之间。你只需要用analogRead()读取这个值。
硬件要求
- Arduino or Genuino 开发板
- ADXL3xx 加速计
电路
这个加速计用很少电路,所以它能插在你的开发板上直接运行。为了实现这个目的,你要用三个模拟输出引脚作为数字I/O引脚,为加速计提供电源和地,还有自检引脚。你要用其他三个模拟输入引脚来读取加速计的模拟输出。
原理图
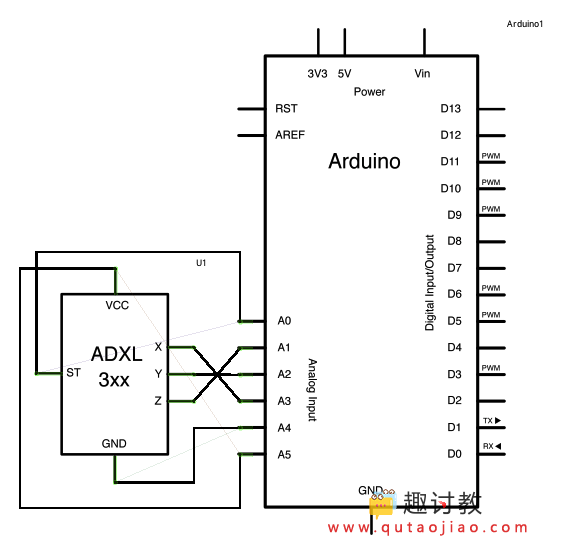
- 这是引脚配置连接表格:
| Breakout Board Pin | Self-Test | Z-Axis | Y-Axis | X-Axis | Ground | VDD |
| Arduino Analog Input Pin | 0 | 1 | 2 | 3 | 4 | 5 |
- 或者如果你只用加速计:
| ADXL3xx Pin | Self-Test | ZOut | YOut | XOut | Ground | VDD |
| Arduino Pin | None (unconnected) | Analog Input 1 | Analog Input 2 | Analog Input 3 | GND | 5V |
- 注意有些加速计用3.3V电源,可能会被5V电源损伤。检查供应商的记录,找出哪种电压合适。
样例代码
- 加速计连接用作提供电源的两个引脚pin4和pin5在程序的开始被定义为常量。而实际操作引脚是作为数字I/O引脚pin18和pin19使用。如果需要,A0是D14,A1是D15等等。
const int groundpin = 18;
const int powerpin = 19; - 设置pin19(A5)为高电平,pin18(A4)为低电平来提供5V给加速计(加速计工作只需要微量电流)。
pinMode(groundpin, OUTPUT);
pinMode(powerpin, OUTPUT);
digitalWrite(groundpin, LOW);
digitalWrite(powerpin, HIGH); - 这个方法允许Sparkfun的开源板直接连接到Arduino或者Genuino开发板。不同板可能要连接到标准的5V或者3.3V和地引脚。在接下来的状况,这个代码可能在void setup()部分改进。
/*
ADXL3xx
The circuit:
analog 0: accelerometer self test
analog 1: z-axis
analog 2: y-axis
analog 3: x-axis
analog 4: ground
analog 5: vcc
created 2 Jul 2008
by David A. Mellis
modified 30 Aug 2011
by Tom Igoe
This example code is in the public domain.
*/
// these constants describe the pins. They won't change:
const int groundpin = 18; // analog input pin 4 -- ground
const int powerpin = 19; // analog input pin 5 -- voltage
const int xpin = A3; // x-axis of the accelerometer
const int ypin = A2; // y-axis
const int zpin = A1; // z-axis (only on 3-axis models)
void setup() {
// initialize the serial communications:
Serial.begin(9600);
// Provide ground and power by using the analog inputs as normal
// digital pins. This makes it possible to directly connect the
// breakout board to the Arduino. If you use the normal 5V and
// GND pins on the Arduino, you can remove these lines.
pinMode(groundpin, OUTPUT);
pinMode(powerpin, OUTPUT);
digitalWrite(groundpin, LOW);
digitalWrite(powerpin, HIGH);
}
void loop() {
// print the sensor values:
Serial.print(analogRead(xpin));
// print a tab between values:
Serial.print("\t");
Serial.print(analogRead(ypin));
// print a tab between values:
Serial.print("\t");
Serial.print(analogRead(zpin));
Serial.println();
// delay before next reading:
delay(100);
}数据
- 这里是一些由ADXL322 2g加速计对地角度采集的y轴加速读取值。这些值应该和其他轴的一样,只不过变化取决于设备的精度。在水平轴(即是和地平行或者0°),加速计读取值应该大约是512,但这些在其他角度的值可能伴随不同加速计而不同。(如ADXL302 5g)。
| Angle | -90 | -80 | -70 | -60 | -50 | -40 | -30 | -20 | -10 | 0 |
| Acceleration | 662 | 660 | 654 | 642 | 628 | 610 | 589 | 563 | 537 | 510 |
| Angle | 0 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 |
| Acceleration | 510 | 485 | 455 | 433 | 408 | 390 | 374 | 363 | 357 | 355 |


