
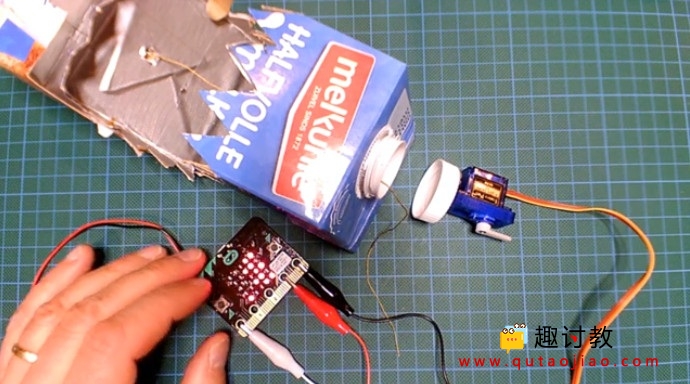
上一期我们用牛奶盒制作了一个机器人,今天我们将它升级,来将它变为一个怪物
物料
- 1个牛奶盒(带可拧顶盖)
- 1小绳 – 从用过的茶包中回收绳子
- 1个回形针
电子产品
- 1微型:钻头,电池座和2节AAA电池
- 3鳄鱼夹
- 1微伺服9g SG90
- 1个为Milky Monster设计的伺服夹,可在thingiverse下载(可选)。教师可能更喜欢下载教室包(16个伺服剪辑)。
工具
- 可以切纸板的小刀和剪刀
- 胶带(遮蔽胶带,胶带和/或包装胶带)
- 胶枪
制备

第1步:下载并剪切模板
下载模板并剪切模板

步骤2:将模板粘贴到牛奶盒上

第3步:切牛奶盒

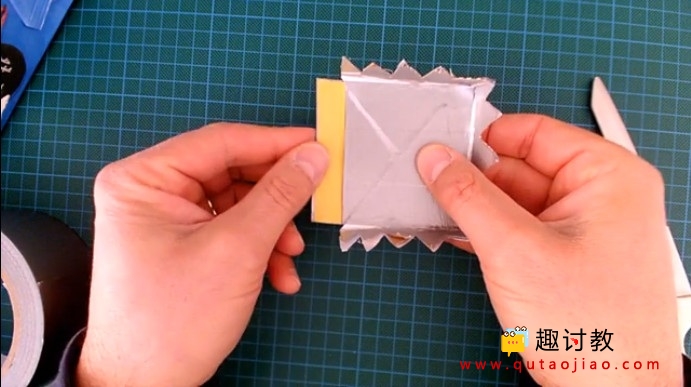
第4步:制作嘴巴
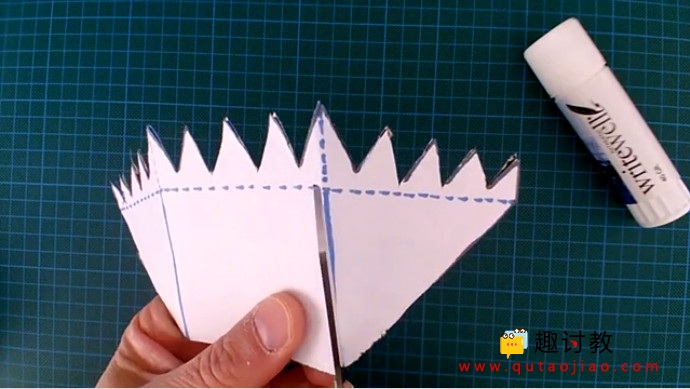
第五步:伸出嘴巴
用胶带将嘴伸出约1厘米。一个接一个地折叠。
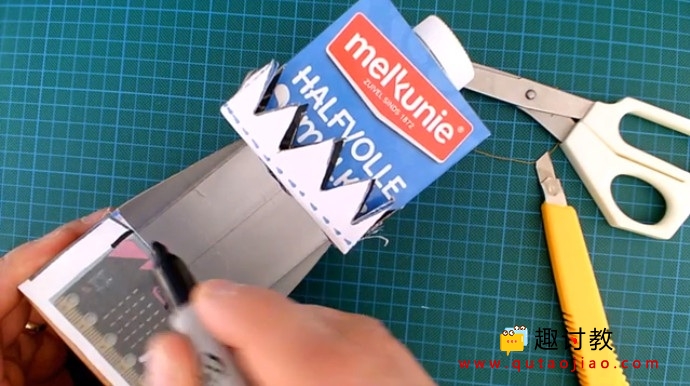
第6步:连接电源线
使用剪刀,创建一个小整体插入电源线。将电源线缠绕在嘴的背面。

完成后,将嘴部定位在向上位置,并将绳索固定在帽子之间。https://youtu.be/Qyndcsmt0AU
第7步:为micro:bit创建空间
使用剪刀在Milky Monster底部创造空间以附加micro:bit。
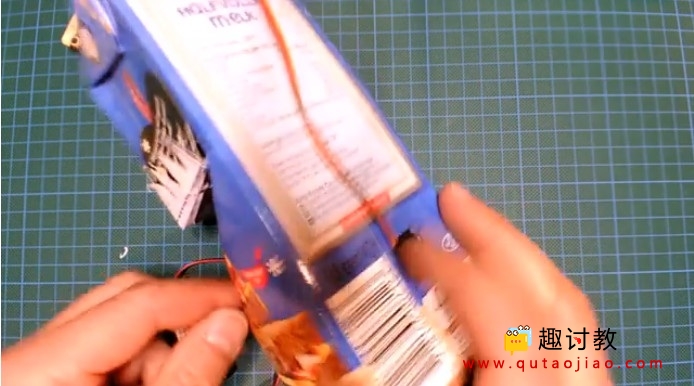
步骤8:为电缆创建空间
创建空间,将电缆很好地布置在乳白色怪物的背面。

步骤9:将夹子连接到伺服
使用飞利浦螺丝刀将伺服机安装到3D打印的伺服夹上。如果您没有可用的3D打印夹子,请在物件上下载,或使用绑带或胶枪修理伺服。
步骤10:将伺服连接到牛奶按钮
胶水伺服到牛奶盒的盖子。

步骤11:在帽子上切出一个洞
在帽中切出一个孔,将弦引导到伺服系统。
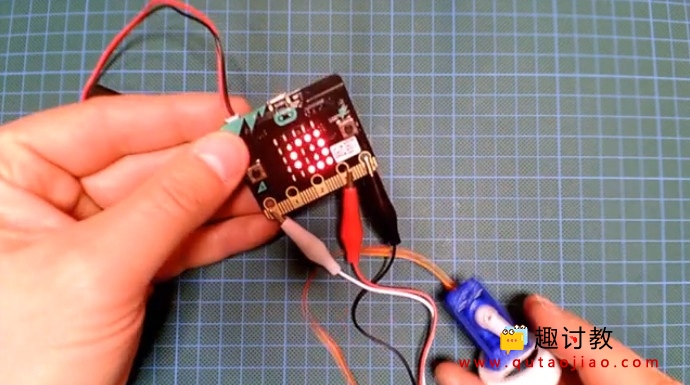
第12步:连接鳄鱼夹
将鳄鱼夹连接到伺服器。
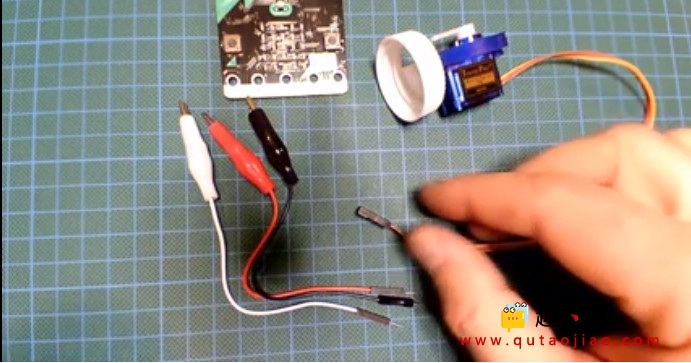
我们可以发挥我们的想象来装饰一下

第13步:校准伺服
为了让Milky Monster移动,micro:bit需要命令伺服以一定速度进入0和180度之间。在下面的代码中: – 按下按钮A将伺服切换到180度(关闭乳白色怪物的嘴)。- 按下按钮B将伺服切换到0度(打开Milky Monster的嘴)。
第14步:安装转子
在将转子安装到伺服电机之前,伺服电机应定位在180度。这将确保一旦伺服达到180度,就会关闭怪物的嘴。
第15步:检查校准
当用户按下A伺服转子时应处于“向上”位置。
第16步:将电线连接到转子
将Milky Monster口关闭时,将电源线连接到伺服转子上。
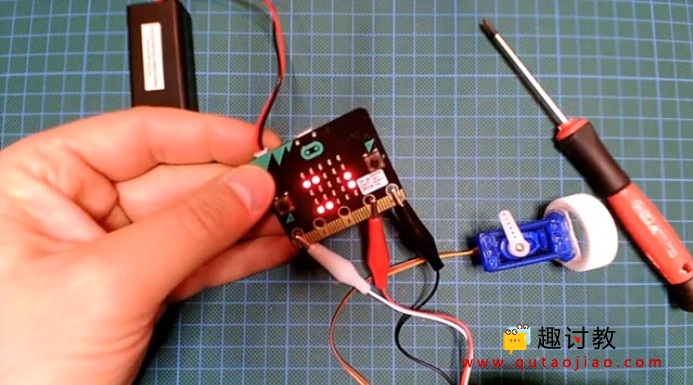
步骤17:将电缆连接到micro:bit
将电缆从micro:bit连接到伺服电源并放置电池。
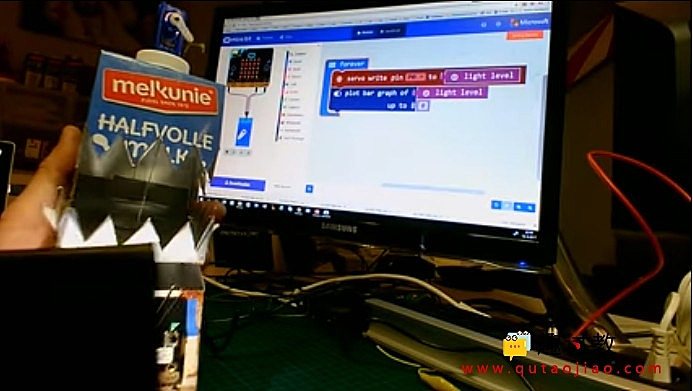
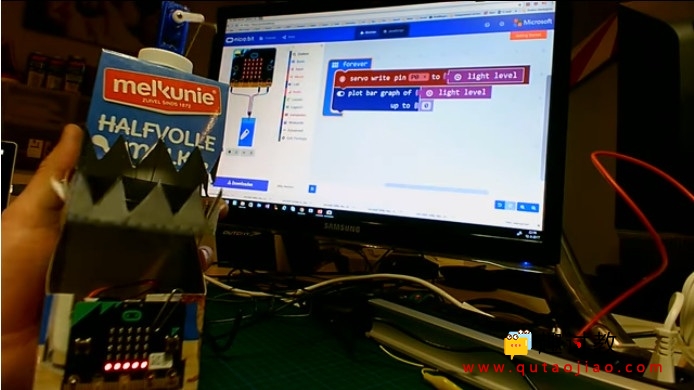
第18步:编码光传感器
对micro:bit上的光传感器进行编码以控制伺服。
连接
这部分你需要第二个micro:bit。通过使用接收机,我们可以用另一个micro:bit来控制Milky Monster。将下面的代码下载到微型:位于Milky Monster上的位,再次下载到另一个“控制器”micro:位。每当按下按钮A时,Milky Monster将移动一次。
radio.onDataPacketReceived(({receivedNumber}) => {
pins.servoWritePin(AnalogPin.P0, 0)
basic.pause(500)
pins.servoWritePin(AnalogPin.P0, 180)
basic.pause(500)
})
input.onButtonPressed(Button.A, () => {
radio.sendNumber(0)
})


