

释放双眼,带上耳机,听听看~!
目录
介绍
7段显示
7段显示器由8个LED段组成。它们用于显示数字(0-9)和某些字母(如c,A,H,P等)。
- 这些LED段中的7个呈线形,而1个段是圆形的。
- 8个元件中的每一个都有一个与之相关的引脚,可以驱动为高电平或低电平。
- 要显示数字或字母,我们需要打开显示屏的特定LED段。
搭建图
7段显示器与MSP-EXP430G2 TI启动板连接
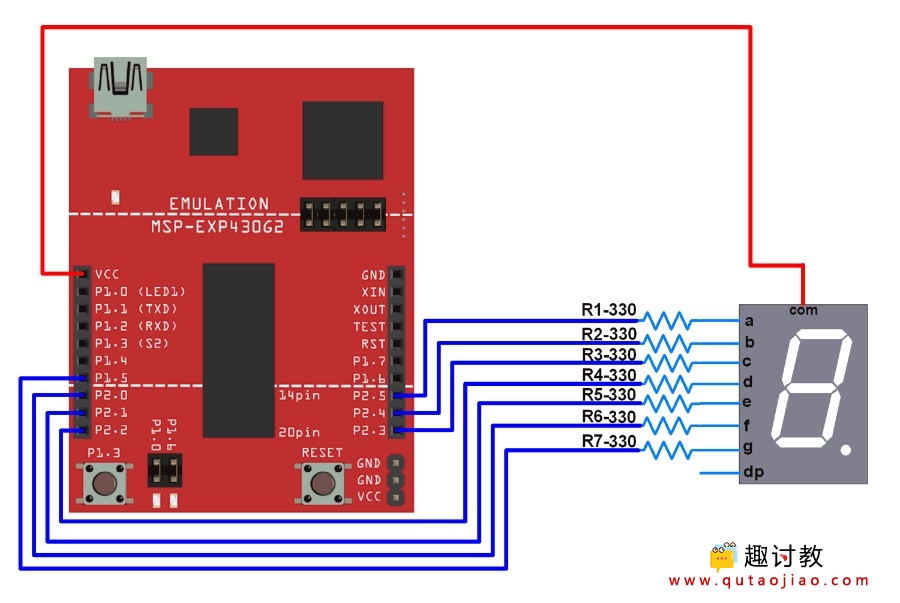
7段显示器与MSP-EXP430G2 TI启动板连接
这里,7段显示器由MSP-EXP430G2 TI Launchpad直接驱动。需要在显示器和MSP-EXP430G2 TI Launchpad板之间连接电阻器。根据要显示的数字或字母,应用控制信号。
注意: 我们使用了共阳极显示器,因此公共引脚连接到5V。如果使用共阴极显示器,则公共引脚需要接地。
对于共阳极显示器,驱动引脚LOW以打开相应的LED段。
对于共阴极显示器,驱动引脚HIGH以打开相应的LED段。
使用SN7446AN驱动器与MSP-EXP430G2 TI Launchpad连接7段显示器
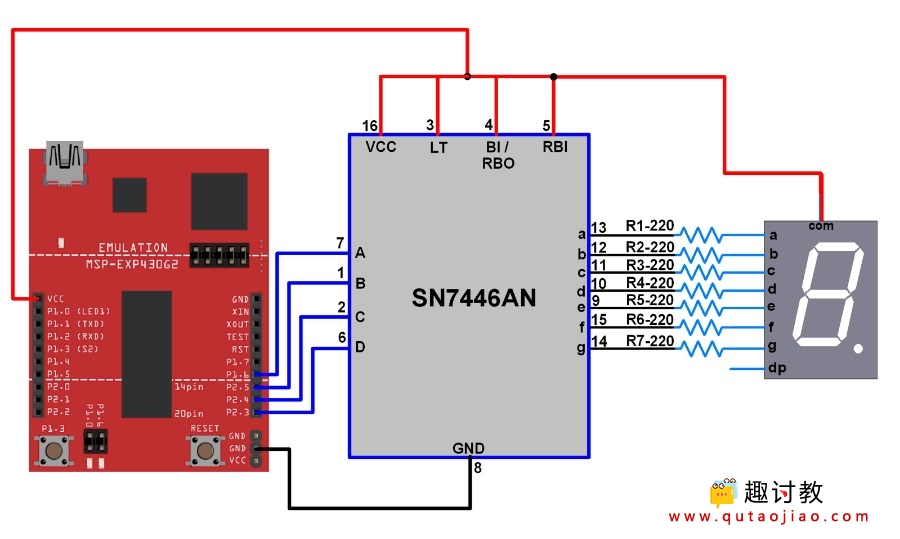
使用SN7446AN驱动器与MSP-EXP430G2 TI Launchpad连接7段显示器
这里,7段显示器由SN7446AN IC驱动。它是一个BCD到7段驱动器/解码器IC。这减少了驱动7段显示器所需的引脚数量。
注意: MSP-EXP430G2 TI Launchpad主板具有512字节的RAM,可轻松上传,尤其是在使用不同库时。有时您需要串行缓冲区足够大以包含所需的数据,并且您必须修改串行库的缓冲区大小。在做这些事情时,我们必须确保代码不会使用超过70%的RAM。这可能导致代码以不稳定的方式工作,有时运行良好并且在其他方面失败。
有些时候RAM使用率可能会超过70%并且代码将完全正常工作,并且即使RAM使用率为65%,代码也无法工作。
在这种情况下,可能需要对缓冲区大小和/或变量进行一些试验和错误。
用于控制7段显示的程序
int disp_pin[7]; /* array for a-g pins of 7-Segment display */
void define_segment_pins(int a, int b, int c, int d, int e, int f, int g) /* Assigns 7-segment display pins to board */
{
disp_pin[0] = a;
disp_pin[1] = b;
disp_pin[2] = c;
disp_pin[3] = d;
disp_pin[4] = e;
disp_pin[5] = f;
disp_pin[6] = g;
}
void display_number(int num) /* Function for displaying number (0-9) */
{switch(num)
{case 0:
digitalWrite(disp_pin[0], LOW); /* Drive disp_pin[0] to LOW */
digitalWrite(disp_pin[1], LOW); /* Driving LOW turns on LED segment for common anode display */
digitalWrite(disp_pin[2], LOW);
digitalWrite(disp_pin[3], LOW);
digitalWrite(disp_pin[4], LOW);
digitalWrite(disp_pin[5], LOW);
digitalWrite(disp_pin[6], HIGH);
break;
case 1:
digitalWrite(disp_pin[0], HIGH); /* Drive disp_pin[7] to HIGH */
digitalWrite(disp_pin[1], LOW);
digitalWrite(disp_pin[2], LOW);
digitalWrite(disp_pin[3], HIGH); /* Driving HIGH turns off LED segment for common anode display */
digitalWrite(disp_pin[4], HIGH);
digitalWrite(disp_pin[5], HIGH);
digitalWrite(disp_pin[6], HIGH);
break;
case 2:
digitalWrite(disp_pin[0], LOW);
digitalWrite(disp_pin[1], LOW);
digitalWrite(disp_pin[2], HIGH);
digitalWrite(disp_pin[3], LOW);
digitalWrite(disp_pin[4], LOW);
digitalWrite(disp_pin[5], HIGH);
digitalWrite(disp_pin[6], LOW);
break;
case 3:
digitalWrite(disp_pin[0], LOW);
digitalWrite(disp_pin[1], LOW);
digitalWrite(disp_pin[2], LOW);
digitalWrite(disp_pin[3], LOW);
digitalWrite(disp_pin[4], HIGH);
digitalWrite(disp_pin[5], HIGH);
digitalWrite(disp_pin[6], LOW);
break;
case 4:
digitalWrite(disp_pin[0], HIGH);
digitalWrite(disp_pin[1], LOW);
digitalWrite(disp_pin[2], LOW);
digitalWrite(disp_pin[3], HIGH);
digitalWrite(disp_pin[4], HIGH);
digitalWrite(disp_pin[5], LOW);
digitalWrite(disp_pin[6], LOW);
break;
case 5:
digitalWrite(disp_pin[0], LOW);
digitalWrite(disp_pin[1], HIGH);
digitalWrite(disp_pin[2], LOW);
digitalWrite(disp_pin[3], LOW);
digitalWrite(disp_pin[4], HIGH);
digitalWrite(disp_pin[5], LOW);
digitalWrite(disp_pin[6], LOW);
break;
case 6:
digitalWrite(disp_pin[0], LOW);
digitalWrite(disp_pin[1], HIGH);
digitalWrite(disp_pin[2], LOW);
digitalWrite(disp_pin[3], LOW);
digitalWrite(disp_pin[4], LOW);
digitalWrite(disp_pin[5], LOW);
digitalWrite(disp_pin[6], LOW);
break;
case 7:
digitalWrite(disp_pin[0], LOW);
digitalWrite(disp_pin[1], LOW);
digitalWrite(disp_pin[2], LOW);
digitalWrite(disp_pin[3], HIGH);
digitalWrite(disp_pin[4], HIGH);
digitalWrite(disp_pin[5], HIGH);
digitalWrite(disp_pin[6], HIGH);
break;
case 8:
digitalWrite(disp_pin[0], LOW);
digitalWrite(disp_pin[1], LOW);
digitalWrite(disp_pin[2], LOW);
digitalWrite(disp_pin[3], LOW);
digitalWrite(disp_pin[4], LOW);
digitalWrite(disp_pin[5], LOW);
digitalWrite(disp_pin[6], LOW);
break;
case 9:
digitalWrite(disp_pin[0], LOW);
digitalWrite(disp_pin[1], LOW);
digitalWrite(disp_pin[2], LOW);
digitalWrite(disp_pin[3], LOW);
digitalWrite(disp_pin[4], HIGH);
digitalWrite(disp_pin[5], LOW);
digitalWrite(disp_pin[6], LOW);
break;
default:
digitalWrite(disp_pin[0], HIGH);
digitalWrite(disp_pin[1], LOW);
digitalWrite(disp_pin[2], LOW);
digitalWrite(disp_pin[3], LOW);
digitalWrite(disp_pin[4], LOW);
digitalWrite(disp_pin[5], HIGH);
digitalWrite(disp_pin[6], LOW);
break;
}
}
void setup() {
pinMode(7, OUTPUT);
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);
pinMode(11, OUTPUT);
pinMode(12, OUTPUT);
pinMode(13, OUTPUT);
define_segment_pins(13,12,11,10,9,8,7); /* a-g segment pins to TI Launchpad */
}
void loop() {
int i;
for(i = 9; i>=0; i--)
{
display_number(i);
delay(1000);
}for(i = 0; i<=9; i++)
{
display_number(i);
delay(1000);
}
}
使用SN7446AN解码器/驱动器控制7段显示的程序
int bcd_pins[4]; /* array for A-D pins of driver IC */
void bcd_control_pins(int a, int b, int c, int d) /* Assigns A-D pins of deiver IC to TI Launchpad */
{
bcd_pins[0] = a;
bcd_pins[1] = b;
bcd_pins[2] = c;
bcd_pins[3] = d;
}
void display_number(int num) /* Function for displaying number (0-9) */
{switch(num)
{case 0:
digitalWrite(bcd_pins[0], LOW); /* Drive bcd_pin[0] to LOW */
digitalWrite(bcd_pins[1], LOW); /* Driving LOW turns on LED segment for common anode display */
digitalWrite(bcd_pins[2], LOW);
digitalWrite(bcd_pins[3], LOW);
break;
case 1:
digitalWrite(bcd_pins[0], HIGH);
digitalWrite(bcd_pins[1], LOW);
digitalWrite(bcd_pins[2], LOW);
digitalWrite(bcd_pins[3], LOW);
break;
case 2:
digitalWrite(bcd_pins[0], LOW);
digitalWrite(bcd_pins[1], HIGH);
digitalWrite(bcd_pins[2], LOW);
digitalWrite(bcd_pins[3], LOW);
break;
case 3:
digitalWrite(bcd_pins[0], HIGH); /* Drive bcd_pin[3] to HIGH */
digitalWrite(bcd_pins[1], HIGH); /* Driving HIGH turns on LED segment for common anode display */
digitalWrite(bcd_pins[2], LOW);
digitalWrite(bcd_pins[3], LOW);
break;
case 4:
digitalWrite(bcd_pins[0], LOW);
digitalWrite(bcd_pins[1], LOW);
digitalWrite(bcd_pins[2], HIGH);
digitalWrite(bcd_pins[3], LOW);
break;
case 5:
digitalWrite(bcd_pins[0], HIGH);
digitalWrite(bcd_pins[1], LOW);
digitalWrite(bcd_pins[2], HIGH);
digitalWrite(bcd_pins[3], LOW);
break;
case 6:
digitalWrite(bcd_pins[0], LOW);
digitalWrite(bcd_pins[1], HIGH);
digitalWrite(bcd_pins[2], HIGH);
digitalWrite(bcd_pins[3], LOW);
break;
case 7:
digitalWrite(bcd_pins[0], HIGH);
digitalWrite(bcd_pins[1], HIGH);
digitalWrite(bcd_pins[2], HIGH);
digitalWrite(bcd_pins[3], LOW);
break;
case 8:
digitalWrite(bcd_pins[0], LOW);
digitalWrite(bcd_pins[1], LOW);
digitalWrite(bcd_pins[2], LOW);
digitalWrite(bcd_pins[3], HIGH);
break;
case 9:
digitalWrite(bcd_pins[0], HIGH);
digitalWrite(bcd_pins[1], LOW);
digitalWrite(bcd_pins[2], LOW);
digitalWrite(bcd_pins[3], HIGH);
break;
default:
digitalWrite(bcd_pins[0], LOW);
digitalWrite(bcd_pins[1], LOW);
digitalWrite(bcd_pins[2], LOW);
digitalWrite(bcd_pins[3], LOW);
break;
}
}
void setup() {
pinMode(11, OUTPUT);
pinMode(12, OUTPUT);
pinMode(13, OUTPUT);
pinMode(14, OUTPUT);
bcd_control_pins(14,13,12,11); /* A-D of driver IC to TI Launchpad */
}
void loop() {
int i;
for(i = 9; i>=0; i--)
{
display_number(i);
delay(1000);
}for(i = 0; i<=9; i++)
{
display_number(i);
delay(1000);
}
}


